
Portable Knee-Ankle-Foot Robot for Gait Rehabilitation
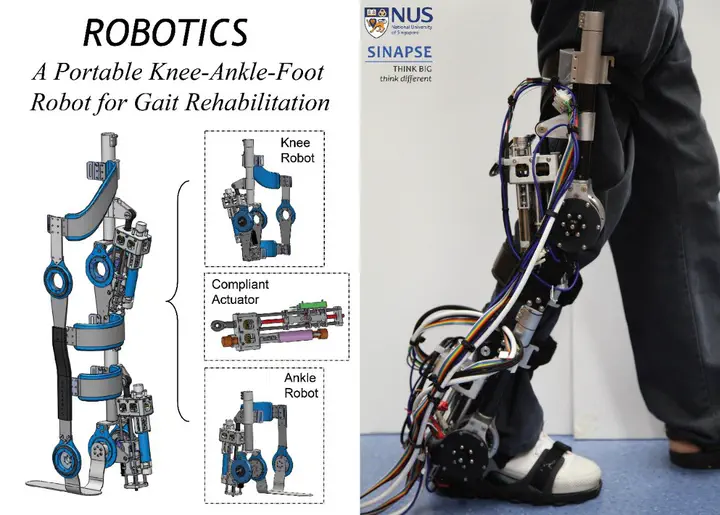
We are developing an intelligent knee-ankle-foot robot, which is compact, modular, and portable, for stroke patients to carry out gait rehabilitation at outpatient and home settings. This robot was designed with a novel compact compliant force controllable actuator. Figure 1 shows the robot design. A modular design was adopted for the knee and ankle joint so that the robot can assist patients with different degrees and types of impairments. The light-weight anthropomorphic structure designed based on biomechanical studies was built with advanced composite materials to achieve portability. At a total weight of less than 4Kg, it is lighter than most of the gait rehab robots. Electromyography signals from the key muscle groups were used to detect human intent. Multi-degree-of-freedom inertial sensors were used together with foot pressure sensors and joint angle sensors to accurately detect the gait cycle. An adaptive shared control system was developed to deliver optimal assistive torque needed based on the individual patient characteristics and different phases of the recovery process. The robot can be controlled with a microcontroller that is attached to the waist of the user. Trials with stroke patients are being conducted to verify the functional outcome of the device in the next phase of the project. This robot can also serve as an assistive device for individuals suffered from other neurological diseases.