
Omnidirectional Mobility Platform
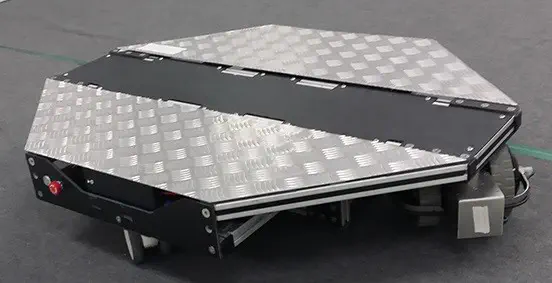
This is project aims to develop robotic technologies for productivity improvement in industry. We develop a heavy duty omni-directional mobility platform that can carry manipulators and other tools to perform mobile tasks in the agile and flexible workspace. The challenge in this project is to scale up the loading capability of the omni-directional mobility system. We also worked on the modelling and control of the mobility system with its unique kinematic and dynamics. Such mobile platform has very broad applications in factories, logistic warehouse, and hospitals for mobile manipulations and material transport, especially when it is equipped with autonomous sensing and navigation capabilities. A working prototype that can carry 200Kg has been developed and tested.